This section briefly summarizes basic concepts of surface EMG decomposition into contributions of individual motor units. It is divided in three different parts:
- Surface EMG and neural commands,
- Motor unit identification from surface EMG,
- Accuracy of motor unit identification.
More detailed overview of EMG decomposition can be found in (Holobar and Farina, 2014) and in other articles found in Publications.
Surface EMG and neural commands
Human movements result from electrical activity of neural cells in the central (CNS) and peripheral nervous systems (PNS). The mechanisms driving the activity of CNS and PNS are not yet fully understood, mainly due to the complexity of neural interactions that are difficult to measure in vivo (Holobar and Farina, 2014). However, at the output level, the alpha motor neurons directly transform the neural commands from the spinal cord circuitries into electrical activity of muscles and, ultimately, into muscle forces.
In a normal condition, there is one-to-one relationship between the number of electrical pulses in a given alpha motor neuron and the number of electrical pulses in each muscle fiber that this motor neuron innervates. Moreover, at the neuromuscular junction, the electrical activity of a single alpha motor neuron gets projected to several tens or hundreds of muscle fibers (Figure 1) that are all innervated by the same motor neuron. These muscle fibers form so called motor unit and respond more or less synchronously to each electrical pulse from alpha motor neuron, generating tens or hundreds of single fiber action potentials (SFAPs). Due to their synchronicity, these SFAPs mathematically add up into so called motor unit action potential (MUAP). Therefore, muscles electrically amplify the activity of motor neurons. This amplification is so efficient that it warrants the sampling of the neural activation non-invasively by measuring the electrical activity of skeletal muscles, the so called electromyogram (EMG) (Merletti and Parker 2004, Merletti et al 2010).
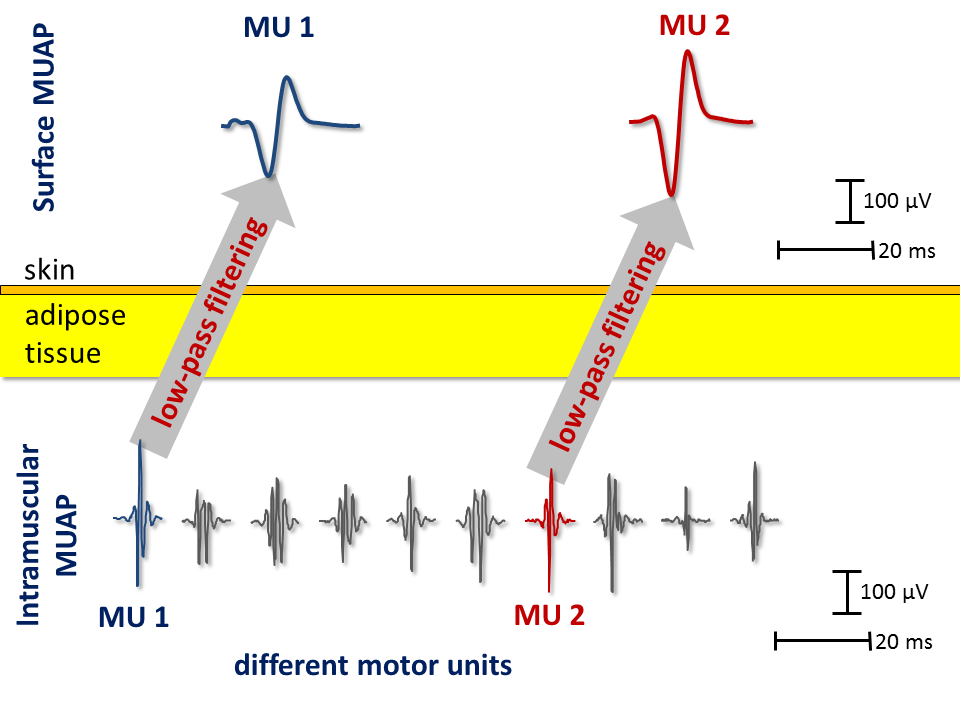
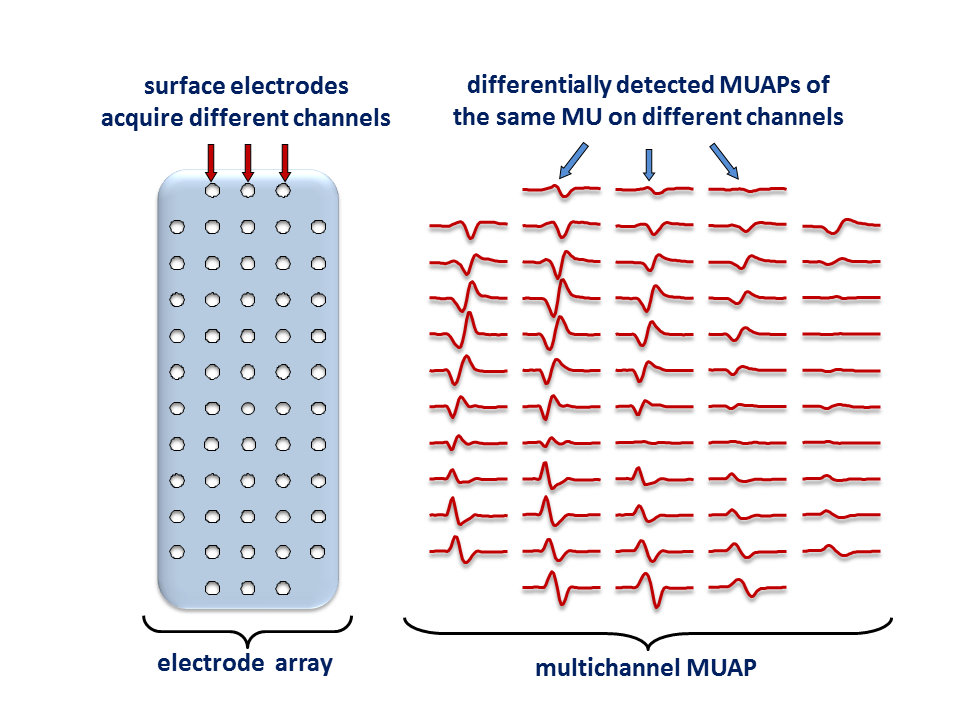
The interpose tissue that separates the uptake electrodes and the active muscle fibers acts as a low-pass filter and smoothens the detected MUAPs. As a result, MUAPs of different motor units may appear rather similar when measured from a small skin surface above the investigated muscle (Figure 2). This means that accurate motor unit identification from a few surface EMG channels only might not be possible (Farina et al. 2008). However, as demonstrated in (Farina et al. 2008), EMG sampling with larger arrays of surface electrodes (Figure 3) increases significantly the number of identifiable motor units, regardless of the decomposition approach used.
Motor unit identification from surface EMG
Surface electrodes are much less selective than intramuscular ones. Consequently, the surface EMG measures the contributions of many active motor units, within the depth of a few cm. The detected signal is typically highly interferential and, thus, difficult to interpret. Different amplitude modulators, such as average rectified value (ARV) and root-mean-square (RMS) value have been proposed as indirect measures of neural drive to the skeletal muscles. However, while easy to calculate, ARV and RMS metrics are often difficult to interpret, mainly due to the fact that they mix the information on the anatomy of the investigated muscle and the properties of acquisition system itself with the neural commands sent by the CNS and PNS (Farina et al. 2010). Moreover, the acquired EMG frequently contains the contributions of different sources, either different muscle compartments or even nearby muscles. The reliable extraction of information from the surface EMG requires separation of the neural commands from all the aforementioned sources and is, thus, a challenge of source separation (Holobar and Farina, 2014).
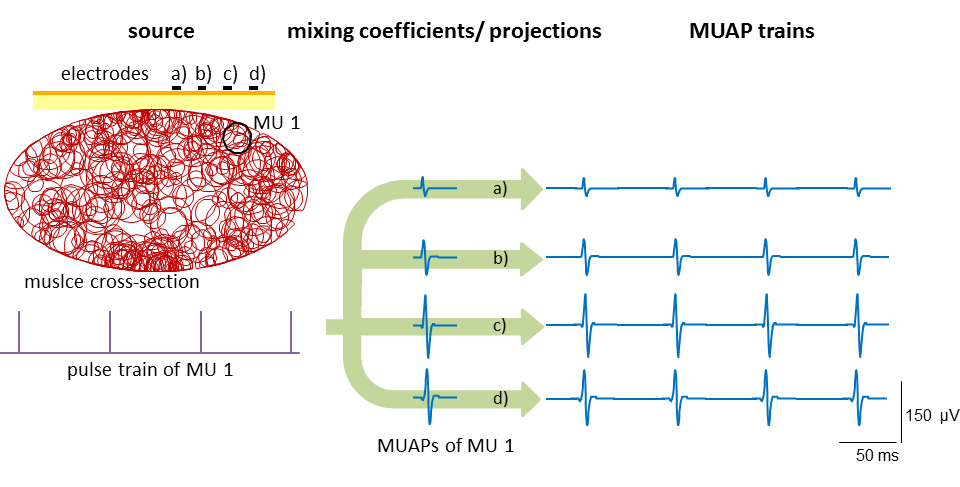
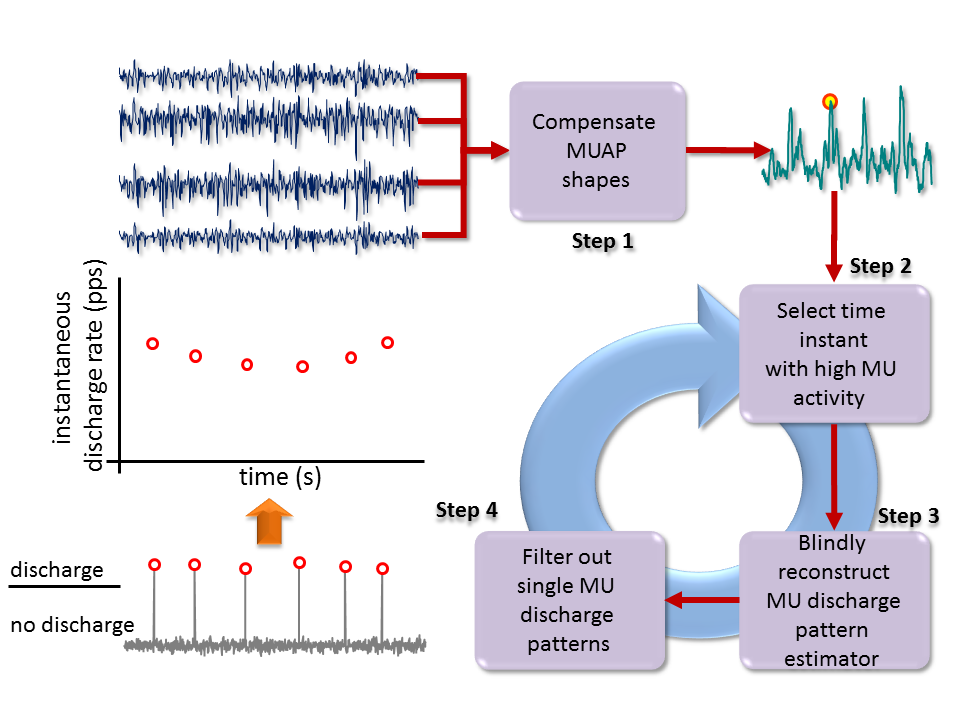
Several attempts to decompose the surface EMG signals into contributions of individual motor units have been proposed in the literature (for review see Holobar and Farina, 2014). Among them, a very efficient sequential motor unit identification technique, so called Convolution Kernel Compensation (CKC), was proposed by Holobar and Zazula (2004, 2007). The CKC method models the EMG signals as the outputs of the convolutive mixing model (Figure 4). In this model, the motor unit activity is represented by spike trains, i.e., binary sequences of zeros and ones, with ones indicating a discharge and zeros standing for the periods with no discharges, whereas the MUAP shapes are treated as mixing coefficients. The latter can take almost arbitrary values (for details see Holobar and Farina, 2014). Thus, the convolutive mixing model can account for arbitrary differences among the MUAP shapes in different EMG channels. Indeed, CKC decomposition technique has been successfully tested in muscles with highly diverse anatomy, including calf, quadriceps and hamstring muscles (Holobar et al 2010, Marateb et al 2011), shoulder and arm muscles (Holobar et al 2009, 2010), wrist and finger muscles (Holobar et al 2010, 2012), facial muscles (Radeke et al 2013) and anal sphincters (Cescon et al 2014a, 2014b).
The CKC technique directly estimates the binary motor unit discharge patterns, without estimating the MUAPs (Figure 5). It belongs to the family of latent variable analysis (LVA)-based approaches and, as such, it inherently resolves the MUAP superimpositions (Holobar and Zazula 2004, 2007). It has been proven to successfully cope with highly synchronized MU discharge patterns, such as in the case of pathological tremor (Holobar et al 2012) and irregular discharge patterns, such as in the case of stroke patients. It has also been tested in type II diabetes patients (Watanabe et al 2013) and cleft lip patients (Radeke et al 2013).
Accuracy of motor unit identification
Although under investigation for more than a decade, the methodology of accuracy assessment is still under intense discussion in the field of EMG decomposition (Holobar and Farina, 2014). The proposed accuracy measures include indirect measures, such as MUAP shapes, their propagation across the surface EMG channels and coefficient of variability for MU inter-discharge interval. These measures support the exclusion of results that fall outside the physiologically established limits, but offer only a coarse insight into the decomposition accuracy, especially in the case of muscle pathologies.
Direct accuracy measures have also been proposed, relaying either on advanced surface EMG simulators or simultaneous acquisition and decomposition of indwelling and surface EMG. While providing a very detailed insight into the behaviour of decomposition techniques, the results of simulations cannot trivially be extrapolated to specific experimental conditions. Similarly, the number of motor units that are detected by both surface and indwelling EMG is usually relatively small (Holobar et al. 2010, Marateb et al. 2011), limiting the strict accuracy assessment to a few motor units per contraction only. At the same time, the experimental costs of simultaneous indwelling and surface EMG acquisition and decomposition are relatively high.
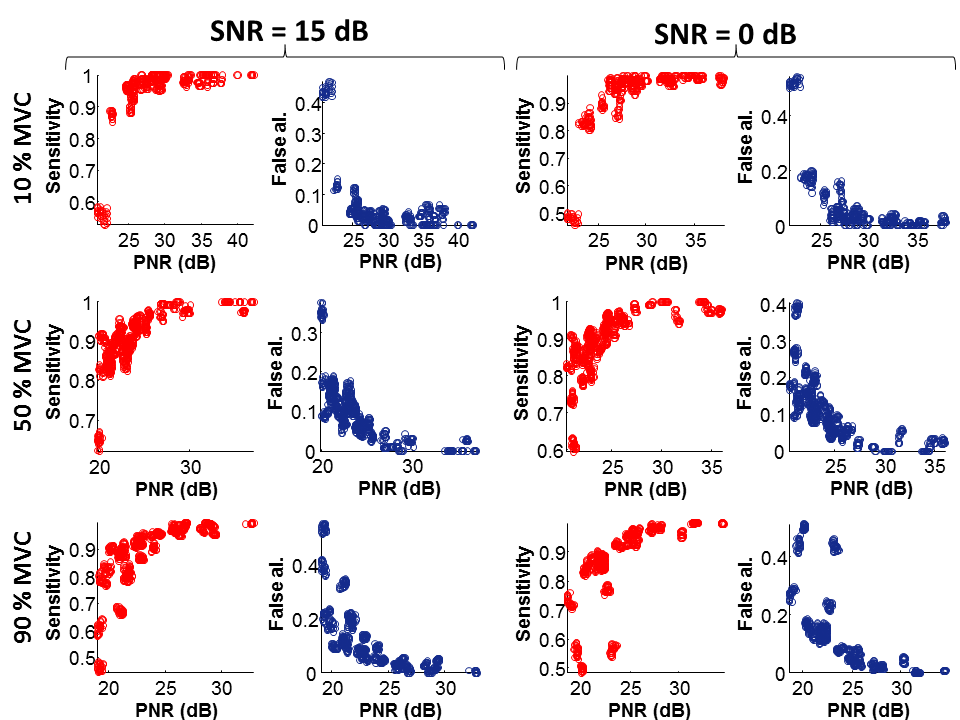
In order to surpass these limitations, a signal-based measure of motor unit identification accuracy has been proposed and systematically validated in (Holobar et al. 2014). This measure, so called Pulse-to-Noise-Ratio (PNR), is computationally efficient, does not require simultaneous acquisition of indwelling EMG and can be applied to every motor unit that is identified by the CKC technique (Holobar et al. 2004, 2007). In the experimental and simulated signals, covering the muscle contraction forces from 5 % to 70 % MVC, the PNR correlated significantly with both sensitivity and false alarm rate in identification of MU discharges (Figure 6). In the tests performed in (Holobar et al. 2014), all the motor units with PNR > 30 dB exhibited sensitivity > 90% and false alarm rates < 2%. Therefore, a threshold of PNR = 30 dB can be used for selecting motor units that are reliably estimated by CKC decomposition technique (Figure 6).